
ACROS: the robots of the future need a brain. Magazino develops it.
2. October 2018
Share
ACROS stands for “Advanced Cooperative Robot Operating System” and is the operating system we developed for Magazino’s perception-controlled robots. Our robots are also deployed, coordinated and controlled through ACROS. Additionally, ACROS can assist in the development of other perception driven robots with different capabilities. Thus it has the potential to generate a global knowledge database from the data of all robots operated with ACROS: a basis for machine learning and thus new intelligent robot behaviour.
In the past, robots were very deterministic – you could also say: hard-working, but stupid. Once programmed, they put a welding spot in the same place thousands of times at a fixed rate. Moreover, since these robots had no perception of their surroundings, let alone the ability to react intelligently to them, they had to work separated from humans by fences and light barriers. This has changed fundamentally. Through the use of numerous sensors, 3D cameras and computer vision, next-generation robots are now better able to understand what is happening in their environment. At the same time, the environment for robots is becoming increasingly complicated, especially if they have to work with people in the same area. The two implications of this are that the environment can change rapidly,
ACROS means: new possibilities
In the past, robots were always programmed by their individual manufacturers with custom software, exclusively tailored to their respective needs.
ACROS can do more. ACROS makes it possible for the first time to program different types of robots with a comprehensive “operating system”. This would allow the physical (hardware) components of robots to become interchangeable in the future — the intelligence lies in the ACROS software framework. And this is where there is extraordinary potential. As more robots worldwide work with ACROS, more knowledge is collected in the cloud. Through this network, the robots can learn from one another and constantly improve. ACROS also grows with collective intelligence. Our plan is to develop ACROS into a global platform where developers can add their own applications and interfaces.
And what might that look like in the future?
ACROS makes perception driven robotics possible. If ACROS is developed sufficiently, ACROS customers could benefit from the possibility of using a pre-existing framework for their development. This saves resources and accelerates the process enormously.
ACROS will be compatible with numerous types of robots. Only hardware-specific components of ACROS need to be adapted, such as for controlling a robotic manipulator. Another major benefit will be that all robots working with ACROS will be able to share their “experience” in the cloud. You can imagine it like this: Using the data that Robot A collects when picking shoe boxes, Robot B can also pick arbitrary objects that are physically similar, without ever having encountered such objects before.
How does ACROS work in practice?
A (still) fictitious practical example: A customer from the automotive industry would like a software solution with which totes can be located on a conveyor belt with computer vision and then gripped and stacked with a robot arm. Many modules, such as statistics and error reporting, which were programmed for TORU could be used simply by drag-and-drop to program the external hardware. ACROS can also be a very economical modular system for programming. However, the benefits and potential of ACROS go far beyond this. ACROS can be used for remote maintenance, fleet management, as a database for objects and orders, and as a command centre in a warehouse.
ACROS: in a nutshell
Advanced Cooperative Robots are perception-controlled: ACROS must process camera and sensor data in real time and trigger corresponding reactions.
Advanced Cooperative Robots have to deal with uncertainty and work smoothly in parallel: ACROS bundles the data of the entire fleet in operation and immediately communicates environmental changes to all robots.
Advanced Cooperative Robots can learn on their own: the ACROS network and the connected global database enable machine learning and thus intelligent behaviour.
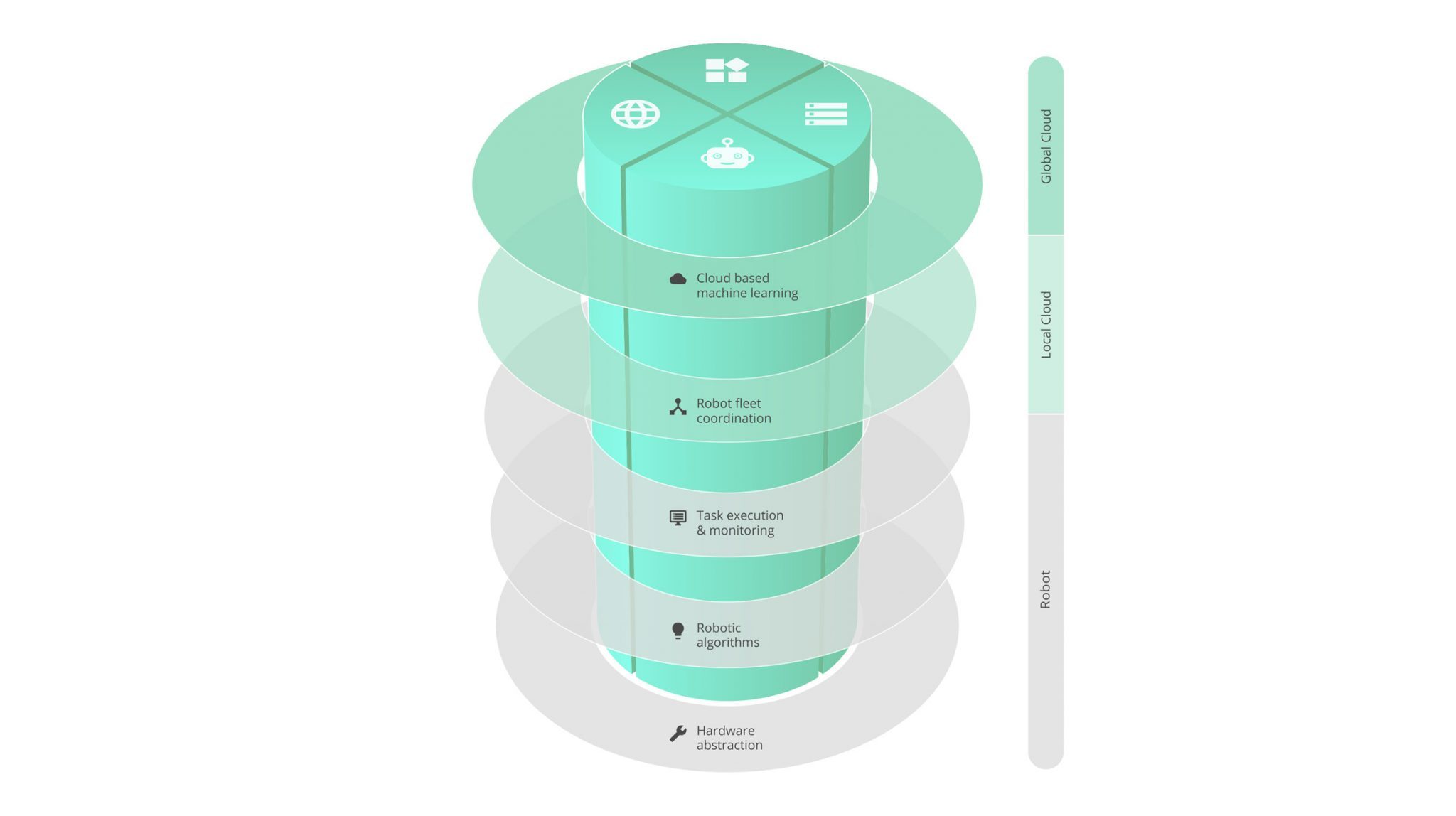
The core of ACROS is the unique concept of modular semantic models. This allows its use across different robotic platforms:
- The modular architecture of ACROS is a comprehensive toolkit for programming perception-controlled and AI-enabled robotic applications.
- The software components range from hardware drivers, perception and motion algorithms to task fulfillment and fleet coordination. The cloud infrastructure for global robot knowledge exchange and machine learning is also included.
- The central concept here is the separation of code from semantic models of the environment, the robot, the objects to be processed and the tasks to be performed.
- This approach allows easy customization for different robotic platforms, environments, and tasks, enabling rapid deployment and seamless operation.
next article