
ACROS: Die Roboter der Zukunft brauchen ein Gehirn. Magazino entwickelt es.
Technology
2. Oktober 2018
Share
ACROS steht für „Advanced Cooperative Robot Operating System“ und ist das von uns entwickelte Betriebssystem für die perzeptionsgesteuerten Roboter von Magazino. Unsere Roboter werden auch über ACROS implementiert, koordiniert und gesteuert. Perspektivisch kann ACROS bei der Neuentwicklung anderer wahrnehmungsgesteuerter Roboter mit verschiedenen Fähigkeiten unterstützten. So hat es das Potenzial, eine globale Wissensdatenbank aus den Daten aller von mit ACROS betriebener Roboter zu generieren: eine Basis für Machine Learning und damit neues intelligentes Verhalten der Roboter.
Früher waren Roboter sehr deterministisch – man könnte auch sagen: fleißig, aber dumm. Einmal programmiert, setzten sie tausende Male einen Schweißpunkt zu einem festgelegten Zeitpunkt an die gleiche Stelle. Da diese Roboter außerdem keinerlei Wahrnehmung ihrer Umgebung hatten, geschweige denn die Fähigkeit, intelligent auf sie zu reagieren, mussten sie durch Zäune und Lichtschranken von Menschen getrennt arbeiten. Das hat sich grundlegend geändert. Durch den Einsatz zahlreicher Sensoren, 3D-Kameras und Computervision können Roboter der neuen Generation mittlerweile immer besser verstehen, was sich in ihrer Umgebung eigentlich alles abspielt. Gleichzeitig wird die Umwelt für Roboter immer komplizierter, besonders wenn sie mit Menschen im selben Bereich arbeiten sollen. Denn das bedeutet zum einen, dass sie sich in einer sehr dynamischen und schwer vorhersehbaren Umgebung immer wieder neu zurechtfinden müssen. Und zum anderen, dass sie sicher parallel zum Menschen agieren können. Bestehende Programmiertools und Lösungen wie eine SPS-Steuerung können diese Anforderungen nicht mehr abbilden. Wir brauchen radikal neue Ansätze, um Roboter zu programmieren, zu steuern und zu vernetzten. Denn Roboter der neuen Generation sind nicht länger deterministisch, sondern wahrnehmungsgesteuert. Deswegen haben wir ACROS entwickelt. Man könnte sagen, ACROS ist so etwas wie ein Roboter-Gehirn. In unseren Modellen TORU und SOTO kommt es erstmal weltweit zum Einsatz.
ACROS bedeutet: neue Möglichkeiten
Die Art und Weise wie wir ACROS gedacht und schon teilweise realisiert haben, ist radikal anders als bisher. In der Vergangenheit wurden Roboter von ihren Herstellern immer individuell und ausschließlich nach den jeweiligen Bedürfnissen mit eigener Software programmiert. ACROS kann mehr. Denn mit ACROS ist es erstmals möglich, unterschiedliche Arten von Robotern mit einem übergreifenden Betriebssystem zu programmieren. Roboter als Hardware könnten damit in Zukunft austauschbar werden – die Intelligenz steckt im Software-Framework ACROS. Und darin liegt außerordentliches Potenzial. Denn je mehr Roboter weltweit mit ACROS arbeiten, desto mehr Erkenntnisse werden in der Cloud gesammelt. Über dieses Netzwerk können die Roboter voneinander lernen und stetig besser werden. Und auch ACROS wächst mit mit kollektiver Intelligenz. Unser Plan ist es, ACROS zu einer weltweit genutzten Plattform zu entwickeln, auf der Entwickler eigene Apps und Schnittstellen einbringen können.
Und wie könnte das in Zukunft aussehen?
ACROS macht perzeptionsgesteuerte Robotik möglich. Wenn ACROS weit genug entwickelt ist, könnten Kunden von ACROS von der Möglichkeit profitieren, ein bereits bestehendes Framework für ihre eigenen Entwicklungen zu nutzen. Das spart viele Ressourcen und beschleunigt damit den individuellen Prozess enorm. Dabei wird ACROS für unterschiedlich konstruierte Roboter verwendet werden können. Nur einzelne Elemente müssen dann individuell auf neue Hardware, wie zum Beispiel einen Greifarm, angepasst werden. Ein weiterer großer Nutzen wird darin liegen, dass alle mit ACROS arbeitenden Roboter ihre „Erfahrungen“ in einer Cloud teilen können. Das kann man sich in etwa so vorstellen: Über die Daten, die Roboter A beim Picken von Schuhkartons sammelt, kann Roboter B unbekannte Objekte, die einem solchen Karton ähneln, ebenfalls picken. Ohne dass dieser jemals zuvor mit diesem Objekt konfrontiert worden wäre.
Wie sieht die Anwendung von ACROS in der Praxis aus?
Ein (noch) fiktives Praxisbeispiel: Ein Kunde aus der Automobilbranche wünscht sich eine Software-Lösung, mit der über Computer-Vision Plastikkisten auf einem Förderband lokalisiert und anschließend mit einem Roboterarm gegriffen und gestapelt werden können. Für die Programmierung der fremden Hardware könnten viele Module, wie zum Beispiel Statistiken und Error-Reporting, die für TORU programmiert wurden, einfach per Drag-and-Drop herangezogen werden. ACROS kann also auch ein sehr ökonomisches Baukasten-System zur Programmierung zu sein. Der Nutzen und das Potenzial von ACROS gehen aber weit darüber hinaus. ACROS dient der Fernwartung, dem Flottenmanagement, als Datenbank für Objekte und Aufträge sowie als Kommandozentrale im Lager.
ACROS: in a nutshell
Advanced Cooperative Robots sind wahrnehmungsgesteuert: ACROS muss die Kamera- und Sensordaten in Echtzeit verarbeiten und entsprechende Reaktionen auslösen.
Advanced Cooperative Robots müssen mit Unsicherheit umgehen und reibungslos parallel arbeiten können: ACROS bündelt die Daten der ganzen Flotte im Einsatz und kommuniziert Änderungen in der Umgebung sofort an alle Roboter.
Advanced Cooperative Robots können selbstständig dazu lernen: Das ACROS Netzwerk und die angeschlossene globale Datenbank ermöglichen Machine Learning und damit intelligentes Verhalten.
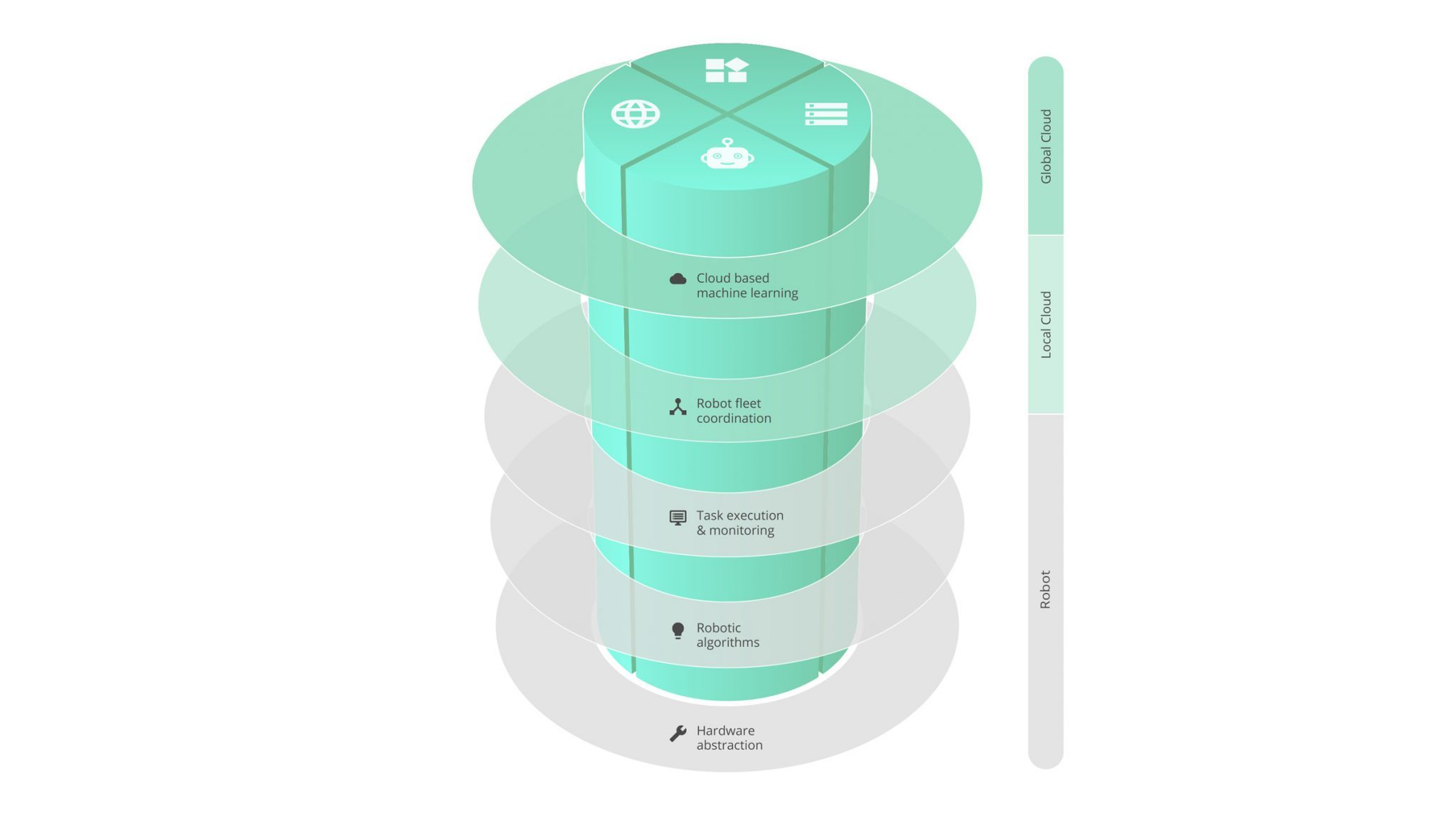
Den Kern von ACROS bildet das einzigartige Konzept modularer semantischer Modelle. Dieses ermöglicht die Verwendung auf verschiedenen Roboter-Plattformen:
- Die modulare Architektur von ACROS ist ein übergreifendes Toolkit für die Programmierung von wahrnehmungsgesteuerten und AI-fähigen Roboteranwendungen.
- Die Softwarekomponenten reichen dabei von Hardwaretreibern über Wahrnehmungs- und Bewegungs-Algorithmen bis hin zu Aufgabenerfüllung und Flotten-Koordination. Auch die Cloud-Infrastruktur für den globalen Roboter-Wissensaustausch und Maschinelles Lernen ist enthalten.
- Zentrales Konzept dabei ist die Trennung des Codes von den semantischen Modellen der Umwelt, des Roboters, der zu bearbeitenden Objekte und den zu erfüllenden Aufgaben.
- Dieser Ansatz ermöglicht eine einfache Anpassung auf verschiedene Roboter-Plattformen, Umgebungen sowie Aufgaben und ermöglicht damit ein schnelles Deployment und flexible Anpassung.
nächster Artikel